Die Position von Personen oder Gegenständen im Raum ist eine grundlegende Eingabeinformation für verschiedene Anwendungen. In drahtlosen Sensornetzen kann die Position einzelner Knoten eine wichtige Eingabeinformation für Anwendungen wie ortsbasiertes Routing oder Positionsbestimmung von Fahrzeugen sein. Die Positionsbestimmung von Sensorknoten basiert üblicherweise auf der Messung des Received Signal Strength Indication (RSSI) oder Laufzeit- bzw. Winkelmessungen. Dazu wird meist zusätzliche Hardware benötigt.

InPhase Sensorknoten
InPhase benötigt keine zusätzliche Hardware neben einem Funk-Transceiver mit Phasen-Messeinheit. Das System kann die Entfernung zwischen zwei Sensorknoten im Netzwerk bestimmen. Durch Hinzufügen von Knoten mit bekannter Position kann die absolute Position eines Sensorknotens bestimmt werden.
Aktuell wird der IEEE 802.15.4 Funk-Transceiver AT86RF233 verwendet. Dieser Chip der Firma Atmel (Microchip) ist durch die integrierte Phasen-Messeinheit in der Lage, die Phase des empfangenen Funksignals zu messen. Durch diese zusätzliche Information ist es möglich, den Abstand zum Sender zu bestimmen. InPhase implementiert die Durchführung einer solchen Phasenmessung, sodass die Entfernung zwischen zwei Funk-Transceivern errechnet werden kann. Weiterhin wurden Untersuchungen zur Qualität der Messung unter verschiedenen Umgebungsbedingen durchgeführt.
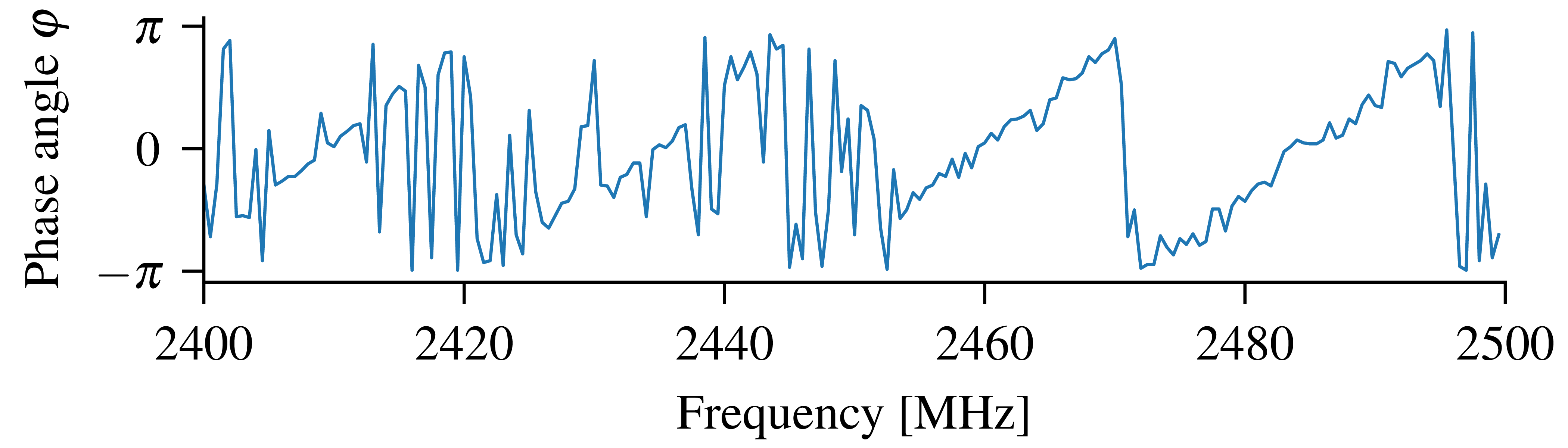
Gemessene Phasendaten
Damit die Positionsbestimmung für spätere Anwendungen verwendet werden kann, sind das Netzwerkprotokoll und die Messung auf Basis des Betriebssystems Contiki von Dunkels et al. implementiert. Als Plattform kommen Varianten des INGA-Sensorknotens zum Einsatz. Weiterhin wurde eine PC-Software entwickelt, die das Sensornetz anweist Phasenmessungen durchzuführen, dann die erhaltenen Messdaten auswertet und schließlich per Partikelfilter die Position von Sensorknoten im aufgespannten Raum bestimmt. Diese Software verwendet weitere Metriken, um die Qualität der Abstandsmessung zu bestimmen und Fehlmessungen von der Positionsbestimmung auszuschließen.

Lokalisation via Partikelfilter


| Name | Telefon | Raum | |
|---|---|---|---|
| Dr. Yannic Schröder | schroeder[[at]]ibr.cs.tu-bs.de | ||
| Prof. Dr.-Ing. Lars Wolf | wolf[[at]]ibr.cs.tu-bs.de | +49 531 3913288 | 138 |
| Titel | Art | Betreuer | Status |
|---|---|---|---|
| InPhase - Positionsbestimmung von Sensorknoten durch Phasenmessung, ... | Masterarbeit | Prof. Dr. Felix Büsching, Stephan Rottmann, Dr. Georg von Zengen | abgeschlossen |
| Implementation of a system to create light paintings with a cable robot | Projektarbeit | Dr. Yannic Schröder | abgeschlossen 2020 |
| Einfluss der Antennen, ihrer Ausrichtung und von Reflexionen auf die Genauigkeit des InPhase-Systems | Bachelorarbeit | Dr. Yannic Schröder | abgeschlossen ~2017 |
| Analyse und Verbesserung des InPhase-Systems | Bachelorarbeit, Masterarbeit, Projektarbeit | Dr. Yannic Schröder | abgeschlossen |
| Adapting InPhase for large indoor networks | Masterarbeit | Dr. Yannic Schröder | abgeschlossen 2020 |
| Parallelisierte Messung von Phasengängen zur Lokalisation | Masterarbeit | Dr. Yannic Schröder | abgeschlossen ~2019 |
| Analyse von phasenbasierten Entfernungsmessungen bei Nicht-Sichtverbindungen und Mehrwegeausbreitung | Masterarbeit | Dr. Yannic Schröder | abgeschlossen ~2018 |
| Implementation and evaluation of a particle filter for the InPhase system | Masterarbeit | Dr. Yannic Schröder, Prof. Dr. Felix Büsching | abgeschlossen ~2016 |
| Analyse des InPhase-Systems zur Verbesserung von Präzision und Genauigkeit | Masterarbeit | Dr. Yannic Schröder | abgeschlossen ~2017 |
| Modularization and Generalization of the InPhase-System for Different Platforms | Masterarbeit | Dr. Yannic Schröder | abgeschlossen ~2019 |
| Implementierung von Software- und Systemtests für das InPhase-System | Projektarbeit | Dr. Yannic Schröder | abgeschlossen ~2017 |
| Statistical approach for the InPhase positioning system | Bachelorarbeit | Dr. Yannic Schröder, Dr. Georg von Zengen, Stephan Rottmann | abgeschlossen ~2015 |
Bei Interesse an einer Bachelor-, Master- oder Projektarbeit im Bereich dieses Projekts bitte einfach Dr. Yannic Schröder kontakieren.