

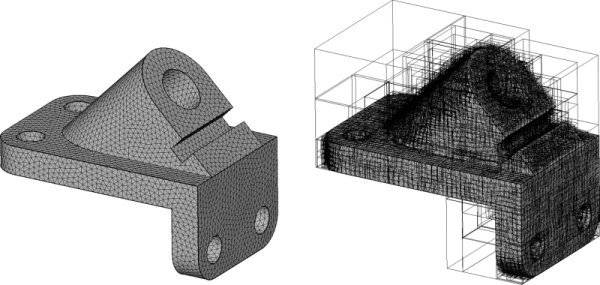
 A bounding volume hierarchy.
A bounding volume hierarchy. 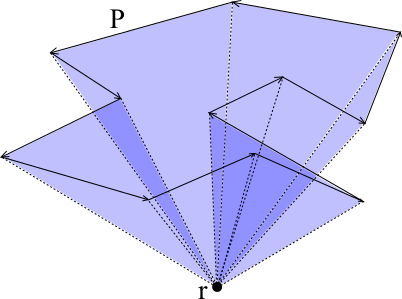
 Generating Polygons.
Generating Polygons. 


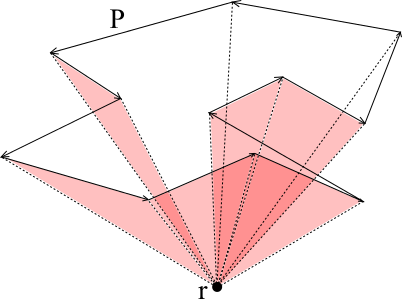
 Exact solutions and lower bounds for art gallery problems
Exact solutions and lower bounds for art gallery problems 


 Scalable distributed algorithms for large robot swarms
Scalable distributed algorithms for large robot swarms 
 Visibility computations in terrains.
Visibility computations in terrains. 
 Assembling polyominoes with tiles in different models.
Assembling polyominoes with tiles in different models.  Controlling cell-scale robots with uniform external actuators.
Controlling cell-scale robots with uniform external actuators. 