| Name | Kurzbeschreibung |
|---|
| ADVEST | Adaptive Verkehrststeuerung |
| AutoNomos | Ein verteilter und selbstregulierender Ansatz für die Organisation eines großen Systems mobiler Objekte |
| Bounding Volume Hierarchy | 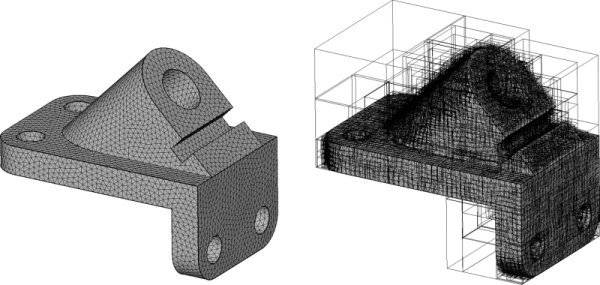 A bounding volume hierarchy. A bounding volume hierarchy. |
| CCC |  |
| Computing Optimal Polygons | 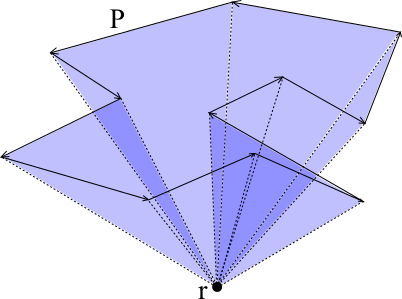 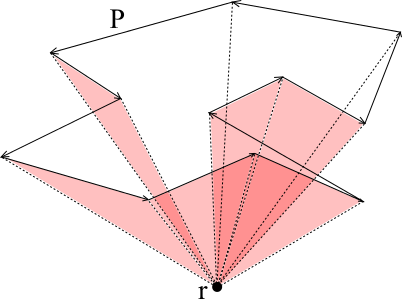 Generating Polygons. Generating Polygons. |
| FRONTS |  Foundations of Adaptive Networked Societies of Tiny Artefacts Foundations of Adaptive Networked Societies of Tiny Artefacts |
| Kunst! |  Exact solutions and lower bounds for art gallery problems Exact solutions and lower bounds for art gallery problems |
| Parallel Motion Planning |  Scheduling a Swarm of Robots with Efficiency Guarantees Scheduling a Swarm of Robots with Efficiency Guarantees |
| Real-World G-Lab |  Real-World G-Lab Real-World G-Lab |
| RecoNodes | Rekonfigurierbare Rechensysteme |
| RoboRithmics | Algorithmische und technische Methoden zur Steuerung eines autonomen Explorationsroboters |
| SPITFIRE | Semantic-Service Provisioning for the Internet of Things using Future Internet Research by Experimentation |
| Swarm Robots |  Scalable distributed algorithms for large robot swarms Scalable distributed algorithms for large robot swarms |
| SwarmNet | Algorithmen und Protokolle für Vernetzung und Betrieb großer Schwärme autonomer Kleinstprozessoren |
| Terrain Visibility |  Visibility computations in terrains. Visibility computations in terrains. |
| Tile Assembly |  Assembling polyominoes with tiles in different models. Assembling polyominoes with tiles in different models. |
| Tilt |  Controlling cell-scale robots with uniform external actuators. Controlling cell-scale robots with uniform external actuators. |
| WISEBED | Wireless Sensor Network Testbeds |
| Wiselib | A generic algorithm library for heterogeneous wireless sensor networks |