| Bearbeiter | (nur für Mitarbeiter:innen einsehbar) |
| Betreuer | Dr. Carsten Buschmann |
| Professor | <> |
| IBR Gruppe | VS (Prof. Fischer) |
| Art | Studienarbeit |
| Status | abgeschlossen |
| Beginn | 2003-04-07 |
Im Rahmen dieser Arbeit soll ein Programm entwickelt werden, dass es einem Lego Roboter ermöglicht, nacheinander sicher und reproduzierbar innerhalb eines am Boden aufgezeichneten Gitterfeldes vorgegebene Positionen anzufahren. Stößt der Roboter auf seiner Fahrt auf ein Hindernis, soll er sich um 180° drehen, und einen anderen Weg zu der Zielposition finden. Der Roboter erhält seine initiale Position und Orientierung, sowie die Zielkoordinaten über die Infrarotschnittstelle. Darüber hinaus kann er Daten nutzen, die ihm Sensoren liefern. Wann immer der Roboter eine ihm bekannte Position im Gitter erreicht, oder auf ein Hindernis stößt, soll er dieses mittels der Infrarotschnittstelle an ein Gateway zum WLAN auf einem PDA senden, der sich auf dem Roboter befindet. Das Gateway wird von einem anderen Studierenden erstellt, mit diesem ist eine Kooperation abzustimmen. Zunächst soll in Zusammenarbeit mit anderen Studenten eine kurze Analyse der verfügbaren Bebtriebs-systeme für den RCX durchgeführt werden. Für die gewählte Plattform ist dann ein geeignetes Programm zu entwickeln und auf seine Funktionsfähigkeit hin zu testen. Abschließend sind die durchgeführten Ar-beiten sorgfältig zu dokumentieren. Studienarbeitsüberblick | |
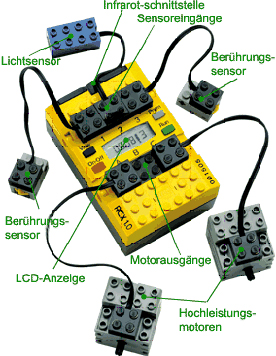 Der Lego RCX ist einen kleiner Computer, der der Steuerung von Lego Mindstorms Robotern dient. Er kann 3 Sensoren auswerten und 3 Motoren steuern. Er verfügt darüber hinaus über eine Infrarotschnitt-stelle, die zum Aufspielen von Programmen und Firmware sowie zur Kommunikation genutzt werden kann.
Der Lego RCX ist einen kleiner Computer, der der Steuerung von Lego Mindstorms Robotern dient. Er kann 3 Sensoren auswerten und 3 Motoren steuern. Er verfügt darüber hinaus über eine Infrarotschnitt-stelle, die zum Aufspielen von Programmen und Firmware sowie zur Kommunikation genutzt werden kann.