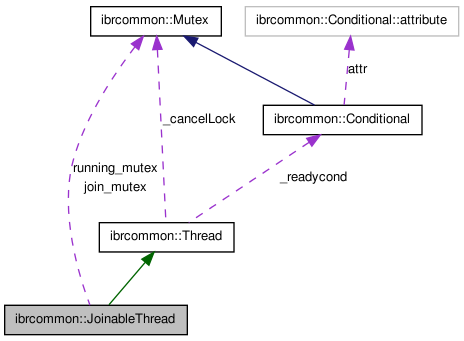
#include <Thread.h>
Inherits ibrcommon::Thread.
Inherited by dtn::api::Client::AsyncReceiver, dtn::core::AbstractWorker::AbstractWorkerAsync, dtn::core::SQLiteBundleStorage, dtn::daemon::ApiServer::Distributor, dtn::daemon::ClientHandler::Sender, dtn::daemon::IndependentComponent [protected], dtn::net::TCPConvergenceLayer::TCPConnection::Sender, dtn::routing::BaseRouter::ThreadedExtension, ibrcommon::Logger::LogWriter, ibrcommon::SimpleTimer, and ibrcommon::Timer.
Public Member Functions | |
| virtual | ~JoinableThread () |
| void | join (void) |
| bool | isRunning (void) |
| void | start (int priority=0) throw (ThreadException) |
| void | stop () throw (ThreadException) |
| void | background (void) |
Protected Member Functions | |
| JoinableThread (size_t size=DEFAULT_STACKSIZE) | |
Detailed Description
A child thread object that may be joined by parent. A child thread is a type of thread in which the parent thread (or process main thread) can then wait for the child thread to complete and then delete the child object. The parent thread can wait for the child thread to complete either by calling join, or performing a "delete" of the derived child object. In either case the parent thread will suspend execution until the child thread exits.
Definition at line 173 of file Thread.h.
Constructor & Destructor Documentation
| ibrcommon::JoinableThread::JoinableThread | ( | size_t | size = DEFAULT_STACKSIZE |
) | [protected] |
Create a joinable thread with a known context stack size.
- Parameters:
-
size of stack for thread context or 0 for default.
Definition at line 211 of file Thread.cpp.
| ibrcommon::JoinableThread::~JoinableThread | ( | ) | [virtual] |
Delete child thread. Parent thread suspends until child thread run method completes or child thread calls it's exit method.
Definition at line 216 of file Thread.cpp.
References join().

Member Function Documentation
| void ibrcommon::JoinableThread::background | ( | void | ) | [inline] |

| bool ibrcommon::JoinableThread::isRunning | ( | void | ) | [inline] |
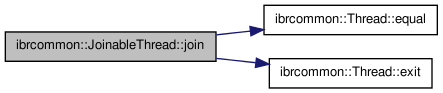
| void ibrcommon::JoinableThread::join | ( | void | ) |
Join thread with parent. Calling from a child thread to exit is now depreciated behavior and in the future will not be supported. Threads should always return through their run() method.
Definition at line 276 of file Thread.cpp.
References ibrcommon::Thread::equal(), ibrcommon::Thread::exit(), IBRCOMMON_LOGGER, and ibrcommon::Thread::tid.
Referenced by ibrcommon::Timer::__cancellation(), dtn::net::UDPConvergenceLayer::componentDown(), dtn::net::LOWPANConvergenceLayer::componentDown(), dtn::net::DiscoveryAgent::componentDown(), dtn::daemon::ApiServer::~ApiServer(), dtn::routing::EpidemicRoutingExtension::~EpidemicRoutingExtension(), dtn::routing::FloodRoutingExtension::~FloodRoutingExtension(), dtn::daemon::IndependentComponent::~IndependentComponent(), ~JoinableThread(), dtn::routing::NeighborRoutingExtension::~NeighborRoutingExtension(), dtn::net::TCPConvergenceLayer::Server::~Server(), dtn::core::SimpleBundleStorage::~SimpleBundleStorage(), ibrcommon::SimpleTimer::~SimpleTimer(), dtn::core::SQLiteBundleStorage::~SQLiteBundleStorage(), and dtn::routing::BaseRouter::ThreadedExtension::~ThreadedExtension().
| void ibrcommon::JoinableThread::start | ( | int | priority = 0 |
) | throw (ThreadException) |
Start execution of child context. This must be called after the child object is created (perhaps with "new") and before it can be joined. This method actually begins the new thread context, which then calls the object's run method. Optionally raise the priority of the thread when it starts under realtime priority.
- Parameters:
-
priority of child thread.
Definition at line 221 of file Thread.cpp.
References ibrcommon::Thread::exec_thread().
Referenced by background(), dtn::daemon::StatisticLogger::componentUp(), dtn::routing::BaseRouter::componentUp(), dtn::net::DiscoveryAgent::componentUp(), dtn::core::WallClock::componentUp(), and dtn::daemon::IndependentComponent::startup().

| void ibrcommon::JoinableThread::stop | ( | ) | throw (ThreadException) |
Stop the execution of child context.
Definition at line 263 of file Thread.cpp.
References ibrcommon::Thread::cancel().
Referenced by dtn::routing::BaseRouter::componentDown(), dtn::net::DiscoveryAgent::componentDown(), ibrcommon::SimpleTimer::remove(), dtn::daemon::IndependentComponent::terminate(), dtn::routing::EpidemicRoutingExtension::~EpidemicRoutingExtension(), dtn::routing::FloodRoutingExtension::~FloodRoutingExtension(), dtn::routing::NeighborRoutingExtension::~NeighborRoutingExtension(), ibrcommon::SimpleTimer::~SimpleTimer(), and ibrcommon::Timer::~Timer().

The documentation for this class was generated from the following files:
- ibrcommon/ibrcommon/thread/Thread.h
- ibrcommon/ibrcommon/thread/Thread.cpp
