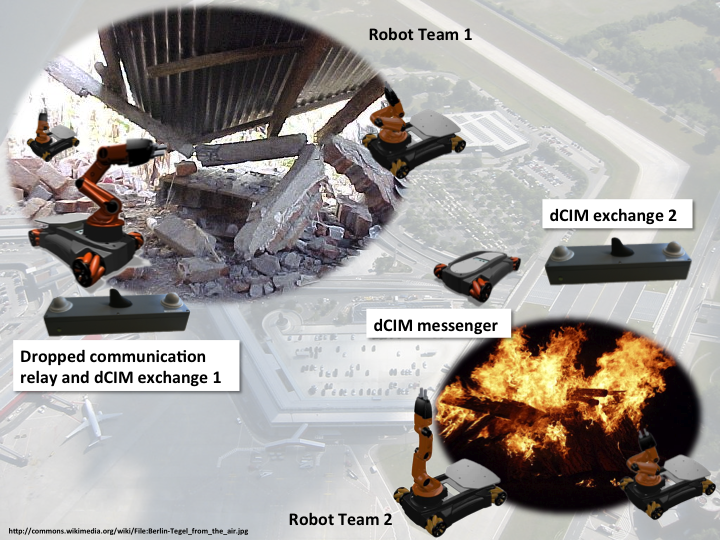
 Recent disasters, such as the Fukushima catastrophe, the attack on the WTC, the Gulf of Mexico oil spill, or the Mont Blanc Tunnel fire, have shown that post disaster management tasks still require considerable human intervention, even though the humans entering affected areas risk their health and lives, causing human tragedy and immense cost for national economies. With view to keeping these dangers and costs at bay, and to increasing effectiveness of disaster management operations, our long-term vision is that teams of autonomous robots equipped with sensors, manipulators, and communication capabilities will be able to enter dangerous, polluted or contaminated areas and to manage all the necessary tasks (e.g. search for survivors, evacuate injured persons, remove safety critical materials, clean up) without the need for explicit human assistance. This inspires the notion of Robotic FireFighters (RFF), in analogy to human fire brigades, where firemen (and firewomen) work together towards the common goal of getting a disaster under control.
Recent disasters, such as the Fukushima catastrophe, the attack on the WTC, the Gulf of Mexico oil spill, or the Mont Blanc Tunnel fire, have shown that post disaster management tasks still require considerable human intervention, even though the humans entering affected areas risk their health and lives, causing human tragedy and immense cost for national economies. With view to keeping these dangers and costs at bay, and to increasing effectiveness of disaster management operations, our long-term vision is that teams of autonomous robots equipped with sensors, manipulators, and communication capabilities will be able to enter dangerous, polluted or contaminated areas and to manage all the necessary tasks (e.g. search for survivors, evacuate injured persons, remove safety critical materials, clean up) without the need for explicit human assistance. This inspires the notion of Robotic FireFighters (RFF), in analogy to human fire brigades, where firemen (and firewomen) work together towards the common goal of getting a disaster under control.
This very challenging long-term objective requires interdisciplinary research in different fields. We intend to contribute toward achieving the objective in this joint project by developing and validating new models and algorithms in the following four interlinked areas, which are implemented as work packages: (I) distributed exploration and perception of hazardous and damaged environments by mobile robots on the basis of 3D laser systems, (II) robust communication paradigms for self-organizing robot teams based on delay and disruption tolerant networking (DTN), (III) multi-agent models and methods for spontaneous automated formation and coordination of robot teams, and (IV) a new distributed Common Information Model (DCIM), to enable groups of robots to exchange relevant information in real-time (e.g., maps of the environment, obstacles or survivors observed, tasks to perform, system status) and to cooperatively plan and execute necessary tasks in a self-organized, situated fashion as they move along. The DCIM connects the work of the three other research areas by serving for integration and validation of the individual research results. The DCIM will make a significant contribution to multi-robot systems research, pushing many future service robotics applications (e.g. in logistics, surveillance, or clear-up operations).
The RFF team took part in the KUKA Innovation Award presenting how innovative RFF frameworks can be adapted to Industry 4.0 scenarios. The RFF project was elected as one of the finalists from more then 30 applicants. 
 |  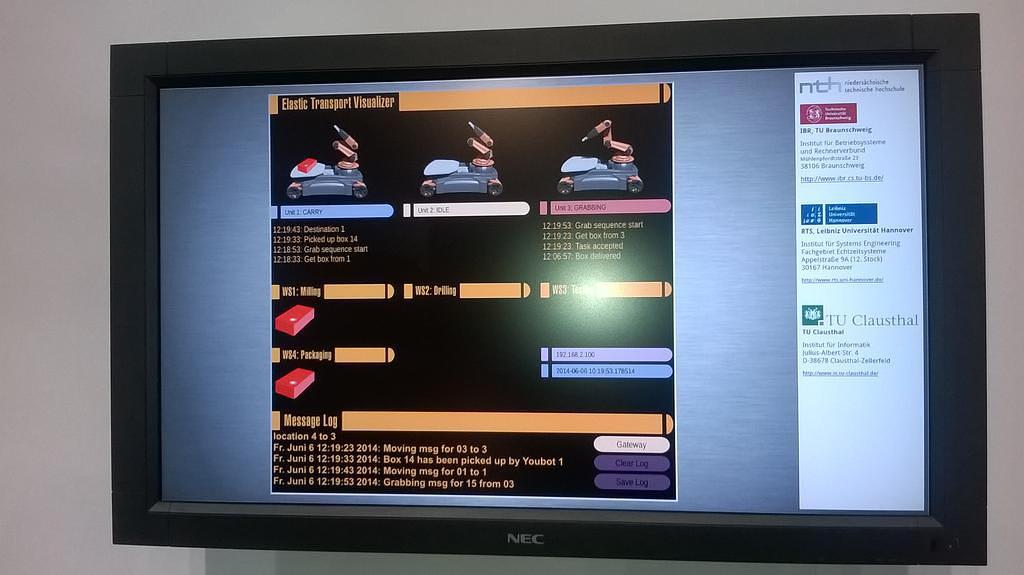 |  |
The research is done in cooperation with Leibniz Universität Hannover and TU Clausthal. The project is funded as a "Bottom-Up" project by the Niedersächsische Technische Hochschule (NTH).