- ECAR -
Extreme Challenge for Autonomous Robots
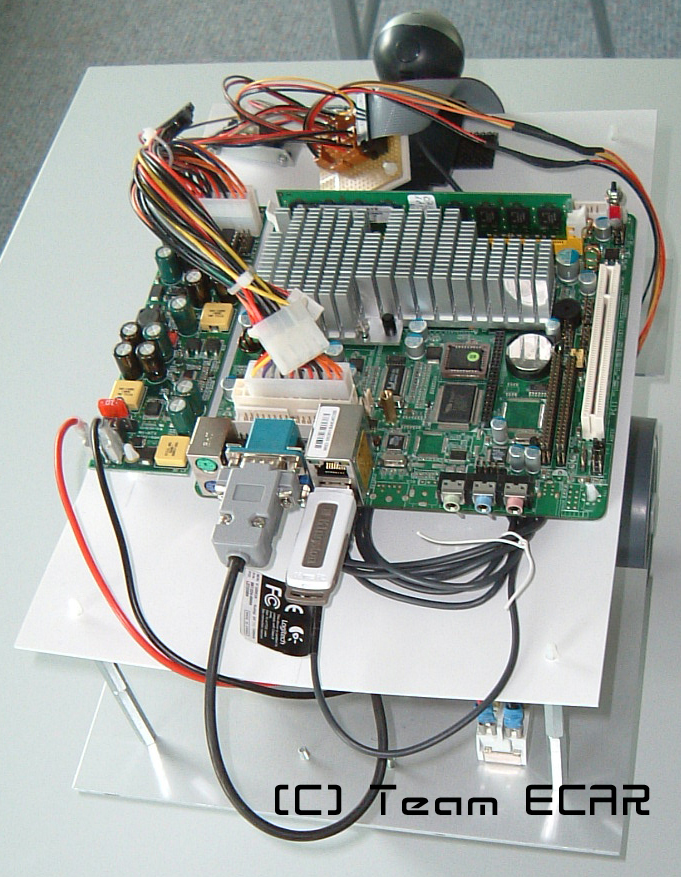
| Aufgabe: | Unsere Aufgabe ist die Entwicklung eines Softwaresystems zur autonomen Steuerung eines Modellversuchsfahrzeugs (siehe Abbildung). Dieses System soll es dem Modellversuchsfahrzeug ermöglichen ein Objekt in einem vorher unbekannten Labyrinth zu suchen und in möglichst kurzer Zeit zu finden. Optional aber wünschenswert ist der Einsatz mehrerer autonomer Roboter, die miteinander kommunizieren, "Teamwork betreiben" und so das gesuchte Objekt noch schneller finden. | |
| Organisatorisches: | Es treten zwei Teams an, eine 6er und unsere 5er Gruppe. Beide haben die selbe Aufgabe. Es herrscht jedoch keine Konkurenz. | |
| Details: | - Die Navigation des Modellversuchsfahrzeugs wird durch das Aufstellen von Baken an bekannten Punkten des Labyrinths und die dadurch ermöglichte Kreuzpeilung sichergestellt. - Der optische Sensor, eine Kamera, nimmt Bilder von der Umgebung des Modellversuchsfahrzeug auf und verschiedene Algorithmen untersuchen die Bilder nach dem gesuchten Objekt und den Aufgestellten Baken, mit deren Hilfe die Position des Fahrzeugs bestimmt wird. - Ein Abstandssensor erlaubt dem Modellversuchsfahrzeug aufkommende Hindernisse zu identifizieren und durch das implementierte Softwaresystem zu umegehen |
|
| Ablauf: | Softwareentwicklungen, die größere Dimensionen annehmen erfordern eine angemessene Analyse und eine strategische, sinnvolle und sukzessive Herangehensweise. Es folgt eine Aufzählung der nötigen Schritte: 1.) Erstellung des Pflichtenheftes 2.) Erstellung Grobentwurf 3.) Erstellung Feinentwurf 4.) Implementierung 5.) Validierung |
|
| Vorgehensweise: (Wasserfallmodell) | 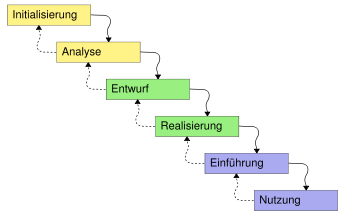 |
|
| Projektname: | ECAR ( Extreme Challenge for Autonomous Robots ) | |
| Sprache: | C++ | |
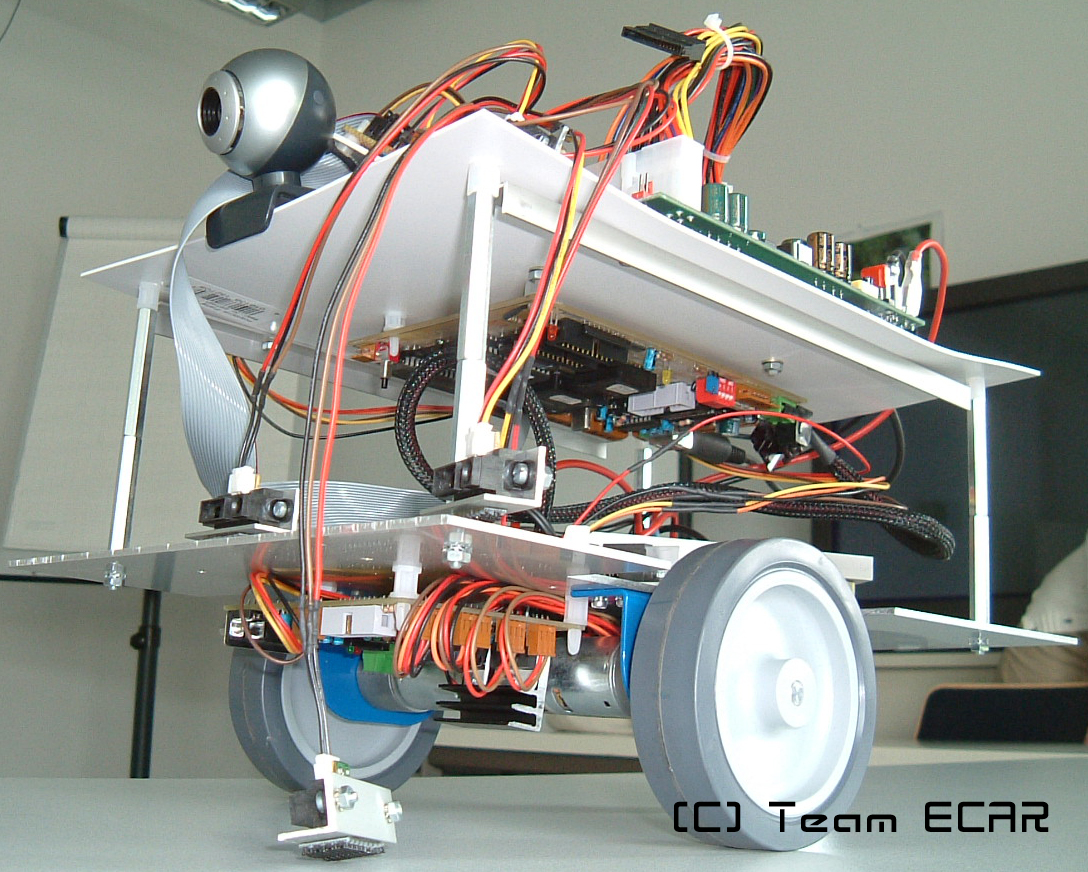
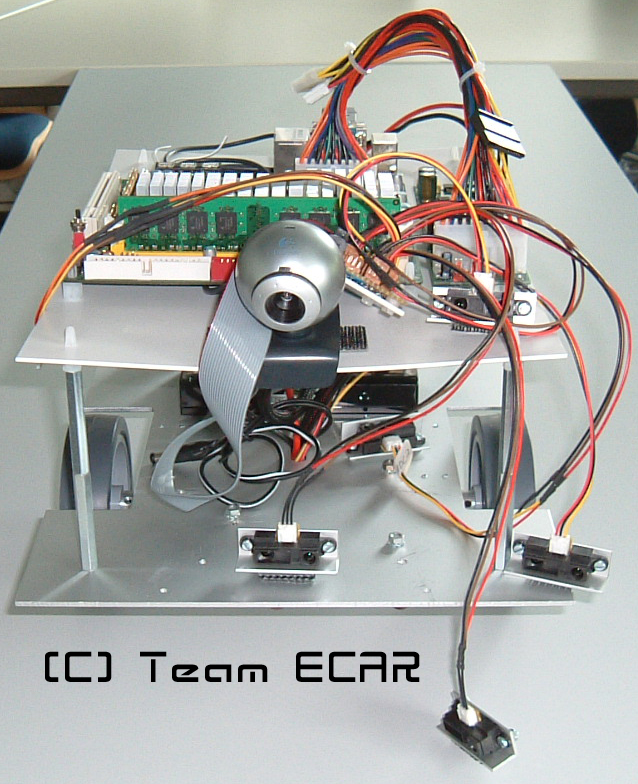
| Modellversuchsfahrzeug: | 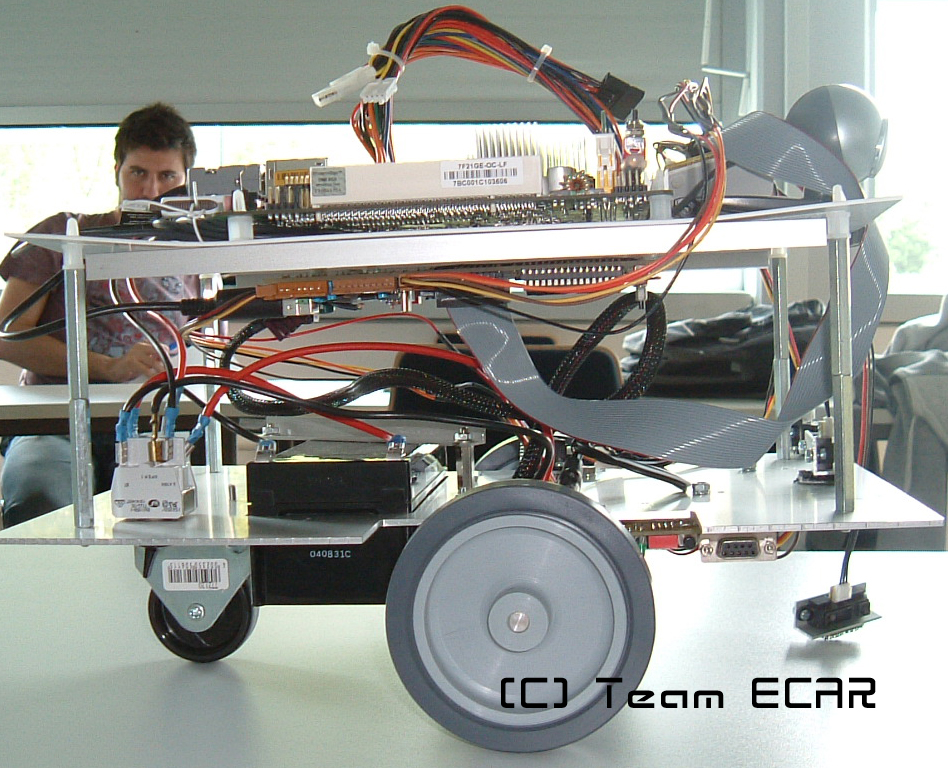 |
 |
 |
 |
|
Das Modellversuchsfahrzeug wird vom Istitut für Betriebssysteme und Rechnerverbund bereitgestellt. Es besteht aus folgenden Komponenten: 1.) Mini-ITX Express Motherboard 2.) Sensoren 3.) Nichtelektronische Teile ( Räder, Achse, Chassis etc. ) |
||